Kontynuacja obliczeń z cz.1 – obliczenia wstępne
6. Obliczenie średnicy wału i średnicy piasty
6.1. Nominalna prędkość kątowa silnika
\omega = {2930 \cdot 2 \cdot \pi \over 60} = 306,8 \ 1/s
6.2. Moment nominalny silnika
M_n = {P \over \omega} = {1100 \over 306,8} = 35,85 \ Nm
6.3. Maksymalny moment silnika
Maksymalny moment na wale pompy wystąpi podczas każdego rozruchu pompy, tuż przed osiągnięciem nominalnej prędkości obrotowej (moment pompy = moment silnika).
Do wyznaczenia maksymalnego moment wykorzystamy krotność moment Mmax/Mn.
M_{max} = M_n \cdot \left( {M_{max} \over M_n} \right) = 35,85 \cdot 2,9 = 103,97
6.4. Średnica rdzenia wału
Na tym etapie projektu nie znamy schematu obciążenia wału. W tej sytuacji, zakładam, że średnicę rdzenia wału można oszacować na podstawie obciążeń skręcających.
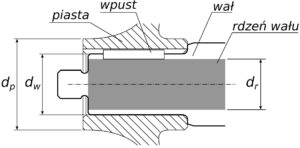
Rys.1. Schemat obliczeniowy średnicy rdzenia wału
Dopuszczalne naprężenia skręcające wału określa wzór:
k_s > {M \over W_o}
Wskaźnik wytrzymałości na skręcania, wału o przekroju kołowym, opisuje wzór:
W_o = {\pi \cdot d^3 \over 16}
Po połączeniu równania na naprężenia i wskaźnik otrzymamy wzór na minimalną średnicę rdzenia wału:
d_r \ge \sqrt[3]{16 \cdot M \over \pi \cdot k_s}
dr - średnica wału M - moment obciążenia wału Wo - wskaźnik wytrzymałości na skręcanie ks - dopuszczalne naprężenia skręcające
d_r \ge \sqrt[3]{16 \cdot M_{max} \over \pi \cdot k_{sj}}
Na wał wybieram stal zwykłej jakości S275
Re = 275 MPa
Dopuszczalne naprężenia skręcające stali S175
k_s = 0,33 \cdot Re = 0,33 \cdot 175 = 90,7 \ MPa
Minimalna średnica wału
d_r \ge \sqrt[3]{16 \cdot M \over \pi \cdot k_s} = \sqrt[3]{16 \cdot 103,97 \over \pi \cdot 90,7 e^6} = 0,018
6.5. Średnica wału
Moment z wału na piastę wirnika będzie przenoszony poprzez połączenie wpustowe.
Na podstawie Poradnika mechanika s. 240, dla średnicy wału 18mm dobieram wpust a x b = 6 x 6.
Zgodnie z zaleceniami Mazanek E. – Przykłady obliczeniowe z podstaw konstrukcji maszyn s. 369 rys.9.4.3, zwiększam średnicę wału o wysokość wpustu.
d_{w min} = d_r + 0,006 = 0,024
Wybieram, pierwszą, większą, znormalizowaną średnicę wału.
d_w = 0,025 = 25 \ mm
6.6. Średnica piasty wirnika
Ze względów wytrzymałościowych i konieczności zmieszczenia rowka na wpust, zakładam, że średnica piasty dp będzie większa o 40% od średnicy wału, patrz rys.1.
d_p = 1,4 \cdot d_w = 1,4 \cdot 0,025 = 0,035 = 35mm
7. Obliczenie średnicy wlotu
7.1. Obliczenia sprawności objętościowej

Rys.1. Schemat obliczeniowy przepływu wewnętrznego
Sprawność objętościowe na podstawie wzoru Łomakina
\eta_V = {1 \over 1+0,287 \cdot n_q^{-2/3}}={1 \over 1+0,287 \cdot 18,49^{-2/3}} = 0,961
7.2. Obliczenia przepływu wewnętrznego
Q_i = {Q \over \eta_V} = {0,0139 \over 0,961} = 0,01446 = 52,05 m^3/h
7.3. Prędkość merydionalna na wlocie
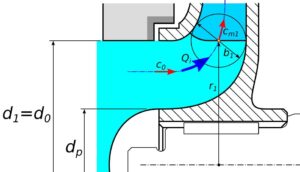
Rys.2. Wlot do wirnika
Prędkość merydionalną na wlocie cm1 można obliczyć ze wzoru:
c_{m1} = K_{cm1} \cdot \sqrt {2g \cdot H}
Wartość współczynnika prędkości merydionalnej, na podstawie wykresu Stepanoffa, wynosi:
K_{cm1} = 0,129 \ \ \ dla \ n_q=18,49
Prędkość merydionalna na wlocie
c_{m1} = K_{cm1} \cdot \sqrt {2g \cdot H} = 0,129 \cdot \sqrt {2 \cdot 9,81 \cdot 50} = 4,07
7.4. Obliczenia średnicy szyjki wirnika
Prędkość w szyjce wirnika
c_0 = 0,9 \cdot c_{m1} = 0,9 \cdot 4,07 = 3,66
Pole przekroju wlotowego, na podstawie równania ciągłości
A_0 = {Q_i \over c_0} = {0,01446 \over 3,66} = 0,003946
Pole przekroju piasty
A_p = {\pi \cdot d_p^2 \over 4} = {3,14 \cdot 0,035^2 \over 4} = 0,000962
7.5. Wybór średnicy wlotowej
Średnica wlotowa wirnika
d_0 = \sqrt {4 \cdot (A_0 + A_p) \over \pi} = 0,0791 = 79,1mm
Wybór średnicy wlotowej pompy zgodnej z szeregiem średnic nominalnych rurociągów DN.
DN – 10, 15, 20, 32, 40, 50, 65, 80, 100, 125, 150, 200, 250, 300, 350, 400, 450, 500
Wybieram średnicę DN – 80.
Przyjmuje rzeczywistą średnicę przekroju wlotowego
d0 = 0,08
Zakładam, że średnica wlotu d1 będzie równa średnicy szyjki wirnika d0
d1= d0 = 0,08
8. Obliczenie kąta łopatki na wlocie
8.1. Obliczenia kata łopatki na wlocie
Prędkość obwodowa na wlocie
u_1 = r_1 \cdot \omega = {0,08 \over 2} \cdot 306,8 = 12,27
Zakładam, że napływ na wirnik jest bez zawirowania wstępnego co oznacza, że kąt napływu cieczy α1 = 90°, a wektor c1 pokrywa się z wektorem cm1.
Obliczeniowy kąt łopatki na wlocie (kąt bezuderzeniowy)
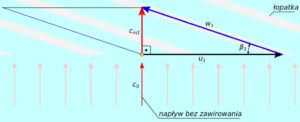
Rys.3. Trójkąt prędkości na wlocie
\beta_1 = arctg \left({c_{m1} \over u_1} \right) = arctg \left({4,07 \over 12,27} \right) = arctg (0,3317) = 0,3203 = 18,35^\circ
8.2. Obliczenia kata konstrukcyjnego łopatki na wlocie
Kąt natarcia na wlocie
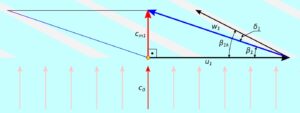
Rys.4. Trójkąt prędkości na wlocie z uwzględnieniem kąta natarcia
Przyjmuje kąt natarcia wg, zaleceń A. Misiewicza
\delta_1 = 22,75 \cdot n_q^{-04581} = 5,98^\circ
Kąt konstrukcyjny łopatki
\delta_{1k} = \beta_1 + \delta_1 = 18,35 + 5,98 = 24,33^\circ
Ostatecznie przyjmuję zaokrągloną wartość kąta łopatki na wlocie
\delta_{1k} = 24^\circ = 0,419 rad
8.3. Wybór technologii wykonania wirnika i liczby łopatek
Na wybór liczby i grubości łopatek decydujący wpływ ma materiał i technologia wykonania wirnika,
Popularne materiały
- żeliwo,
- staliwo,
- brąz,
- stal nierdzewna,
- aluminium,
- tworzywa sztuczne.
Popularne technologie
- odlewanie,
- tłoczenie z blachy,
- spawanie/zgrzewanie,
- klejenie,
- formowanie wtryskowe,
- skrawane.
Wybieram wirnik z żeliwa, wykonany w technologii odlewania.
Grubość łopatki
S = 0,004 = 4mm
Grubość łopatki na wlocie
S1 = 0,003 = 3mm
Liczba łopatek wirników odśrodkowych wynosi Z = 5 ÷ 9.
Przyjmuję liczbę łopatek
Z = 7
9. Obliczenia szerokości kanału na wlocie
9.1. Współczynnik przesłonięcie przekroju na wlocie
Podziałka na wlocie
t_1 = {\pi \cdot d_1 \over Z} = {3,14 \cdot 0,08 \over 7} = 0,0359Rzut grubości łopatki na kierunek unoszenia
s_{u1} = {s_1 \over sin(\beta_{1k})} = {0,003 \over sin(0,419)} = 0,0737Współczynnik przesłonięcia wlotu
\varphi_1 = {t_1 \over t_1 - s_{u1}} = {0,0359 \over 0,0359 - 0,00737} = 1,259
9.2. Szerokość kanału na wlocie
Pole przekroju wlotowego
A_1 = {Q_i \cdot \varphi_1 \over c_{m1}} = {0,01445 \cdot 1,259 \over 4,07} = 0,004469Szrokość wirnika na wlocie
b_1 = {A_1 \over \pi \cdot d_1} = {0,004469 \over 3,14 \cdot 0,08} =0,01776Przyjmuję szerokość na wlocie
b1 = 0,018 = 18mm
10. Obliczenie średnicy i szerokości wirnika na wylocie
10.1. Podstawowe parametry wirnika
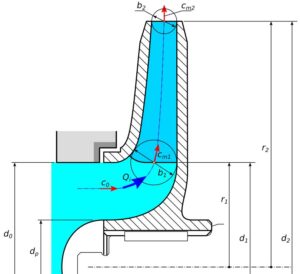
Rys. 4. Przekrój merydionalny wirnika
10.2. Obliczenia poprawki Pfleiderera
Wykonamy obliczenia średnicy wylotu wirnika dla 4 wartości kąta wylotowego łopatki.
- β2 27 = 27°
- β2 30 = 30°
- β2 33 = 33°
- β2 36 = 36°
Teoretyczną wysokość podnoszenia pompy wyznaczymy na podstawie równania Eulera i poprawki Pfleiderera.
Poprawka p jest zdefiniowana wzorem 9.
p={\chi \cdot r_2^2 \over Z \cdot M_{st}} (9)
p - poprawka Pfleiderera χ - współczynnik doświadczalny r2 - promień wirnika na wylocie Z - liczba łopatek Mst - moment statyczny środkowej linii prądu
Oszacowanie współczynnika χ wg. C. Pfleiderera dla odprowadzenia cieczy do spiralnego kanału zbiorczego.
\chi = 0,65 \cdot \left(1+{ \beta_2 \over 60} \right)
- \chi_{27} = 0,65 \cdot \left(1+{ 27 \over 60} \right) = 1,02
- \chi_{30} = 0,65 \cdot \left(1+{ 30 \over 60} \right) = 1,05
- \chi_{33} = 0,65 \cdot \left(1+{ 33 \over 60} \right) = 1,09
- \chi_{36} = 0,65 \cdot \left(1+{ 36 \over 60} \right) = 1,12
Poprawka Pfleiderera dla wirnika odśrodkoweg
p = {2 \cdot \chi \over Z} \cdot {1 \over 1 - \left(d_1 \over d_2 \right)^2}
Wartości średnicy wlotu i wylotu na podstawie punktów 7.3 i 4.5.
- p_{27} = {2 \cdot 1,02 \over 7} \cdot {1 \over 1 - \left( 0,08 \over 0,203 \right)^2} = 0,343
- p_{30} = {2 \cdot 1,05 \over 7} \cdot {1 \over 1 - \left( 0,08 \over 0,203 \right)^2} = 0,355
- p_{33} = {2 \cdot 1,09 \over 7} \cdot {1 \over 1 - \left( 0,08 \over 0,203 \right)^2} = 0,367
- p_{36} = {2 \cdot 1,12 \over 7} \cdot {1 \over 1 - \left( 0,08 \over 0,203 \right)^2} = 0,378
10.3. Oszacowanie sprawności hydraulicznej
Obliczenia średnicy zredukowanej na wlocie wg. Suchanowa
d_{1zr} = 4000 \cdot \sqrt[3]{Q \over n} = 4000 \cdot \sqrt[3]{0,0139 \over 2930} = 67,2mm
Obliczenia sprawności hydraulicznej wg. Łomakina
\eta_h = 1 - {0,42 \over \left( log(d_{1zr}) - 0,172 \right)^2} = 1 - {0,42 \over \left( log(67,2) - 0,172 \right)^2} = 0,846
Q - wydajność pompy m3/s n - prędkość obrotowa obr/min d1zr - średnica zredukowana mm
10.4. Obliczenia prędkości merydionalnej na wylocie
Prędkość merydionalną na wlocie cm2 można obliczyć ze wzoru:
c_{m2} = K_{cm2} \cdot \sqrt {2g \cdot H}
Wartość współczynnika prędkości merydionalnej, na podstawie wykresu Stepanoffa, wynosi:
K_{cm2} = 0,10 \ \ \ dla \ n_q=18,49
Prędkość merydionalna na wlocie
c_{m2} = K_{cm2} \cdot \sqrt {2g \cdot H} = 0,1 \cdot \sqrt {2 \cdot 9,81 \cdot 50} = 3,12
10.5. Obliczenia prędkości obwodowej na wylocie
u_2 = {c_{m2} \over 2 \cdot tg \beta_2} + \sqrt {\left( c_{m2} \over 2 \cdot tg \beta_2 \right)^2 + {g \cdot H \cdot (1 + p) \over \eta_h}}
- u_{2 \ 27} = {3,12 \over 2 \cdot tg 27} + \sqrt {\left( 3,12 \over 2 \cdot tg 27 \right)^2 + {g \cdot H \cdot (1 + 0,343) \over 0,846}} = 31,12
- u_{2 \ 30} = {3,12 \over 2 \cdot tg 30} + \sqrt {\left( 3,12 \over 2 \cdot tg 27 \right)^2 + {g \cdot H \cdot (1 + 0,355) \over 0,846}} = 30,85
- u_{2 \ 33} = {3,12 \over 2 \cdot tg 33} + \sqrt {\left( 3,12 \over 2 \cdot tg 27 \right)^2 + {g \cdot H \cdot (1 + 0,367) \over 0,846}} = 30,65
- u_{2 \ 36} = {3,12 \over 2 \cdot tg 36} + \sqrt {\left( 3,12 \over 2 \cdot tg 27 \right)^2 + {g \cdot H \cdot (1 + 0,378 \over 0,846}} = 30,49
10.6. Obliczenia i wybór średnicy wirnika na wylocie
d_2 = 2 \cdot {u_2 \over \omega}
- d_{2 \ 27} = 2 \cdot {31,12 \over 306,8} = 0,203
- d_{2 \ 30} = 2 \cdot {30,85 \over 306,8} = 0,201
- d_{2 \ 33} = 2 \cdot {30,65 \over 306,8} = 0,200
- d_{2 \ 36} = 2 \cdot {30,49 \over 306,8} = 0,199
Wybieram kąt łopatki β2 = 33º i średnicę d2 = 0,2 = 200mm
10.7. Obliczenia szerokości wylotu
Obliczenia są prowadzone podobnie jak w punkcie 9.
Podziałka na wylocie
t_2 = {\pi \cdot d_2 \over Z} = {3,14 \cdot 0,2 \over 7} = 0,0896
Rzut grubości łopatki na kierunek unoszenia
s_{u2} = {s_2 \over sin(\beta_2)} = {0,004 \over sin(33)} = 0,0734
Współczynnik przesłonięcia wylotu
\varphi_2 = {t_2 \over t_2 + s_{u2}} = {0,0896 \over 0,0896 - 0,00734} = 1,089
Pole przekroju wylotowego
A_2 = {Q_i \cdot \varphi_2 \over c_{m2}} = {0,01445 \cdot 1,089 \over 3,12} = 0,00505
Szerokość wirnika na wylocie
b_2 = {A_2 \over \pi \cdot d_2} = {0,00505 \over 3,14 \cdot 0,2} =0,00805
Przyjmuję szerokość wirnika na wylocie
b2 = 0,008 = 8mm
PAMIĘTAJ !
- To jest ćwiczenie dla studentów a nie „prawdziwy projekt”
Warto sprawdzić: