Punktem wyjścia jest równanie Eulera, przy założeniu nieskończonej liczby nieskończenie cienkich łopatek.
H_{th \infty}={1 \over g} \cdot (u_2 \cdot c_{u2 \infty} - u_1 \cdot c_{u1}) (1)
Zwykle dopływ do pompy nie ma zawirowania wstępnego, więc c1 jest prostopadłe do u1, a cu1 = 0, patrz rys.1.
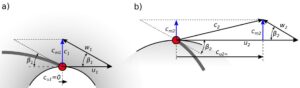
Rys.1. Trójkąty na wlocie i wylocie wirnika
Hth∞- wysokość podnoszenia przy nieskończonej licznie nieskończenie cienkich łopatek c1 - prędkość bezwzględna na wlocie u1 - prędkość unoszenia na wlocie um1 - prędkość merydionalna na wlocie cu1 - rzut prędkości bezwzględnej na kierunek prędkości unoszenia na wlocie β1 - kąt łopatki na wlocie c2 - prędkość bezwzględna na wylocie c2∞ - prędkość bezwzględna na wylocie, przy nieskończonej licznie nieskończenie cienkich łopatek u2 - prędkość unoszenia na wylocie cm2 - prędkość merydionalna na wylocie cu2 - rzut prędkości bezwzględnej na kierunek prędkości unoszenia na wylocie, przy skończonej licznie łopatek cu2∞ - rzut prędkości bezwzględnej na kierunek prędkości unoszenia na wylocie, przy nieskończonej licznie nieskończenie cienkich łopatek β2 - kąt łopatki na wylocie
Wstawiamy wartość cu1 do równania Eulera 1.
H_{th \infty}={1 \over g} \cdot (u_2 \cdot c_{u2 \infty} - u_1 \cdot 0) (2)
Ostatecznie równanie Eulera redukuje się do postaci 3.
H_{th \infty} = {u_2 \cdot c_{u2 \infty} \over g} (3)
Badanie przebieg chakterystyki Hth∞, w funkcji wydajności, na podstawie równania 3 prowadzi kolejno do następujących wniosków:
- prędkość unoszenia jest wartością stałą większą od zera – u_2 = r_2 \cdot \omega = const > 0 bo r_2 = const > 0 i \omega = const > 0
- kąt łopatki jest wartością stałą β2
- zmiana wysokości podnoszenia Hth∞ następuje wyłącznie z powodu zmiany wartości rzutu prędkości bezwzględnej na kierunek prędkości unoszenia cu2
- wydajność pompy jest opisana zależnością Q=A \cdot c_m
- dla wylotu, wydajność pompy jest opisana zależnością Q=\pi \cdot d_2 \cdot b_2 \cdot c_{m2}
- wydajność pompy Q zmienia się na skutek zmiany wartości cm2 bo d_2=const>0 i b_2=const>0
- przy zerowej wydajności Q=0, prędkość merydionalna i kąt prędkości bezwzględnej mają wartość zero cm2 = 0, α2=0, a prędkość bezwzględna pokrywa się z prędkością unoszenia c2 ≡ u2
- przy zerowej wysokości podnoszenia Hth∞=0 prędkość bezwzględna jest prostopadła do prędkości unoszenia α2=90°

Rys.2. Zmiana trójkąta prędkości na wylocie przy zmianie wydajności pompy
Tak więc, przy zerowej wydajności Q=0 wysokość podnoszenia wynosi:
H_{th \infty} = {u_2 \cdot u_2 \over g} = {u_2^2 \over g}
oraz, przy zerowej wysokości podnoszenia Hth∞=0 prędkość merydionalna i wydajność wynosi:
c_{m2} = {u_2 \cdot tg(\beta_2)} (4)
Q_{th \infty} = \pi \cdot d_2 \cdot b_2 \cdot u_2 \cdot tg(\beta_2) (5)
Q - wydajność pompy ω - prędkość kątowa wirnika r2 - promień wirnika na wylocie d2 - średnica wirnika na wylocie b2 - szerokość wirnika na wylocie ρ - gęstość cieczy g - przyśpieszenie ziemskie α2 - kąt prędkości bezwzględnej na wylocie
Na podstawie tych dwóch punktów, możemy narysować teoretyczną charakterystykę przepływu pompy przy nieskończonej liczby nieskończenie cienkich łopatek rys.3.a.
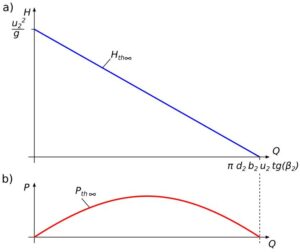
Rys.3. Charakterystyka pompy przy nieskończonej liczbie łopatek
Teoretyczna charakterystyka przepływu Hth∞, rys 3.a, jest podstawą określenia teoretycznej charakterystyki mocy hydraulicznej pompy Pth∞, rys.3.b. Do obliczeń jej przebiegu wykorzystujemy wzór 6.
P_{th \infty} = Q \cdot H_{th \infty} \cdot \rho \cdot g (6)
Charakterystyka przepływu Hth∞(Q) określa ile energii są w stanie przekazać cieczy łopatki wirnika, gdy jest ich nieskończenie wiele (dużo).
Pytanie brzmi: ile energii jest w stanie przekazać mniejsza – skończona liczba łopatek?
Proponuję wykonanie prostego doświadczenia, z talerzem zupy, pokazanego na filmie 1.
Film 1. Zupa
Z przeprowadzonego eksperymentu wynika, że przy obrocie:
- ciecz nie obraca się, względem stołu – układu bezwzględnego
- ciecz obraca się w odwrotnym kierunku, względem talerza – układu ruchomego
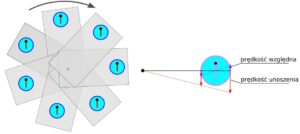
Rys.3. Prędkość względna wywołana wirowaniem obudowy
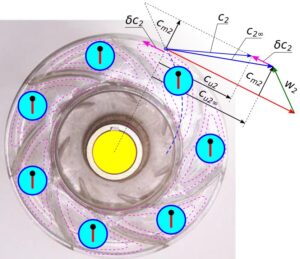
Rys.4. Zmiana prędkości bezwzględnej c2 i jej rzutu cu2 na wylocie przy skończonej liczbie łopatek
Przy skończonej liczby łopatek w przestrzeni międzyłopatkowej tworzy się wir, który zmniejsza wartość rzutu prędkości bezwzględnej na kierunek unoszenia na wylocie o wartość prędkość krążenia δc2, z cu2∞ na cu2. Powoduje to zmniejszenie możliwości przekazywania energii przez wirnik, co jest opisane równaniem 7.
H_{th} = {u_2 \cdot c_{u2} \over g} (7)
Carl Pfleiderer zaproponował aby wpływ skończonej liczby łopatek – stosunek spadku wysokości podnoszenia Hth∞ – Hth do teoretycznej wysokości podnoszenia Hth opisać stałym współczynnikiem p.
{H_{th \infty} - H_{th} \over H_{th}} = p (8)
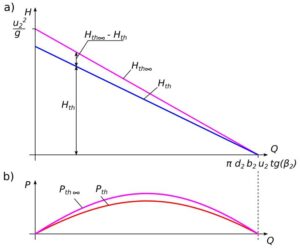
Rys.5. Charakterystyka pompy przy nieskończonej liczbie łopatek
Poprawka p została zdefiniowana, przez autora wzorem 9.
p={\chi \cdot r_2^2 \over Z \cdot M_{st}} (9)
p - poprawka Pfleiderera χ - współczynnik doświadczalny r2 - promień wirnika na wylocie Z - liczba łopatek Mst - moment statyczny środkowej linii prądu
Wartości współczynnika \chi wg. C. Pfleiderera
- \chi = 0,6 \cdot \left( 1+ {\beta_2 \over 60} \right) – wypływ do kierownicy odśrodkowej
- \chi = \left( 0,65 \div 0,85 \right) \cdot \left( 1+ {\beta_2 \over 60} \right) – wypływ do spirali
- \chi = \left( 0,85 \div 1,0 \right) \cdot \left( 1+ {\beta_2 \over 60} \right) – wypływ do kierownicy bezłopatkowej
Zalecane wartości współczynnika χ wg. analizy W. Jędrala
- \chi = \left( 0,55 \div 0,68 \right) + 0,6 \cdot sin \left( \beta_2 \right) – dla d_2 / d_1 \ge 2
- \chi = \left( 1,0 \div 1,2 \right) \cdot \left(1+ sin \left(\beta_2 \right) \right) – dla d_2 / d_1 < 2
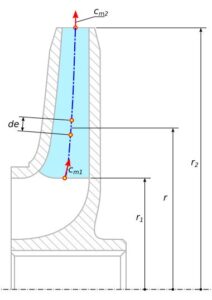
Rys.5. Moment statyczny średniej linii prądu
Moment statyczny środkowej linii prądu względem osi obrotu jest zdefiniowany wzorem 10.
M_{st} = \int_{r_1}^{r_2} r \cdot de (10)
Jeżeli mamy określone współrzędne punktów opisujących środkową linię prądu, wówczas moment statyczny możemy obliczyć z wykorzystaniem arkusza kalkulacyjnego Excel lub Calc.
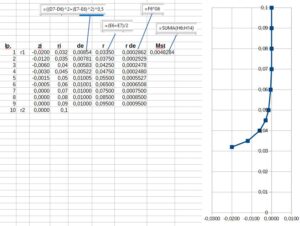
Rys.6. Przykład obliczenia momentu statycznego w arkuszu kalkulacyjnym
Dla wirnika odśrodkowego, środkowa linia prądu jest niemal odcinkiem prostym, prostopadłym do osi obrotu. W tym przypadku możemy moment statyczny obliczyć z uproszczonej formuły 11.
Odległość od osi obrotu – promień odcinka:
r = {r_2 + r_1 \over 2}
Długość odcinaka:
de = r_2 - r_1
M_{st} = r \cdot de = {\left( r_2 + r_1 \right) \cdot \left( r_2 - r_1 \right) \over 2} = {r_2^2 - r_1^2 \over 2} (11)
Po podstawieniu wyrażenia 11 do równania 9 otrzymamy wzór na poprawkę dla pompy odśrodkowej 12.
p={2 \cdot \chi \cdot r_2^2 \over Z \cdot \left(r_2^2 - r_1^2 \right)} = {2 \cdot \chi \over Z} \cdot {1 \over 1 - \left(r_1^2 \over r_2^2 \right)^2} = {2 \cdot \chi \over Z} \cdot {1 \over 1 - \left(d_1^2 \over d_2^2 \right)^2} (12)
PAMIĘTAJ !
- Im mniej łopatek ma wirnik, tym mniej energii może on przekazać do cieczy
- Krążenie prędkości wewnątrz przestrzeni międzyłopatkowej zwiększa kąt wylotowy cieczy
- Krążenie prędkości wewnątrz przestrzeni międzyłopatkowej zwiększa kąt napływu cieczy na łopatki wirnika (kąt natarcia)
- Krążenie prędkości wewnątrz przestrzeni międzyłopatkowej zmniejsza rzut prędkości bezwzględnej na kierunek prędkości unoszenia na wylocie
- Teoretyczna wysokość podnoszenia Hth∞ i Hth określa zdolność wirnika do zamiany energii mechanicznej, z wału, na energię hydrauliczną cieczy
Warto sprawdzić: